
Helloooo! I am Moose! They/Them/He/Him I am a embedded software engineer with autism, depression and anxiaty ( Wooo! ). I post about... whatever I want... software things, mental health things... whatever I feel like Feel very wellcome to send me asks about... anything that strikes your fancy :3
266 posts
Moose-mousse - Electronic Moose

-
 musmansogo liked this · 8 months ago
musmansogo liked this · 8 months ago -
 teriyakiryder37 reblogged this · 8 months ago
teriyakiryder37 reblogged this · 8 months ago -
teriyakiryder37 liked this · 8 months ago
-
 faulinasulaiman liked this · 8 months ago
faulinasulaiman liked this · 8 months ago -
 theomarsworld liked this · 8 months ago
theomarsworld liked this · 8 months ago -
 el-deep liked this · 8 months ago
el-deep liked this · 8 months ago -
 katoisha11 liked this · 8 months ago
katoisha11 liked this · 8 months ago -
 kucingterbanggg reblogged this · 8 months ago
kucingterbanggg reblogged this · 8 months ago -
 omarmzd liked this · 8 months ago
omarmzd liked this · 8 months ago -
 abdoelarabi liked this · 8 months ago
abdoelarabi liked this · 8 months ago -
 mar-youmiii reblogged this · 8 months ago
mar-youmiii reblogged this · 8 months ago -
mar-youmiii liked this · 8 months ago
-
 magdy-seliman-1 liked this · 8 months ago
magdy-seliman-1 liked this · 8 months ago -
 jana-leb reblogged this · 8 months ago
jana-leb reblogged this · 8 months ago -
jana-leb liked this · 8 months ago
-
 lovingurls45 liked this · 9 months ago
lovingurls45 liked this · 9 months ago -
 morganprentiss liked this · 9 months ago
morganprentiss liked this · 9 months ago -
 hiddingssouls liked this · 9 months ago
hiddingssouls liked this · 9 months ago -
 manzanas-y-granadas reblogged this · 9 months ago
manzanas-y-granadas reblogged this · 9 months ago -
 vorta-vortex liked this · 9 months ago
vorta-vortex liked this · 9 months ago -
 confusedspaceotter reblogged this · 9 months ago
confusedspaceotter reblogged this · 9 months ago -
confusedspaceotter liked this · 9 months ago
-
 quietlyimplode reblogged this · 9 months ago
quietlyimplode reblogged this · 9 months ago -
 roseptl liked this · 10 months ago
roseptl liked this · 10 months ago -
 standthereuntilyouresober reblogged this · 10 months ago
standthereuntilyouresober reblogged this · 10 months ago -
 iniziaunsogno reblogged this · 10 months ago
iniziaunsogno reblogged this · 10 months ago -
iniziaunsogno liked this · 10 months ago
-
 strix17 reblogged this · 10 months ago
strix17 reblogged this · 10 months ago -
 dirtyangel liked this · 10 months ago
dirtyangel liked this · 10 months ago -
 legnogrezzo liked this · 10 months ago
legnogrezzo liked this · 10 months ago -
 abatelunare liked this · 10 months ago
abatelunare liked this · 10 months ago -
 animadiicristallo reblogged this · 10 months ago
animadiicristallo reblogged this · 10 months ago -
 secretblackriver liked this · 11 months ago
secretblackriver liked this · 11 months ago -
 sasanya237 liked this · 11 months ago
sasanya237 liked this · 11 months ago -
 erwin0859 liked this · 1 year ago
erwin0859 liked this · 1 year ago -
 lazyblueghost liked this · 1 year ago
lazyblueghost liked this · 1 year ago -
 lifeschanges reblogged this · 1 year ago
lifeschanges reblogged this · 1 year ago -
 verathin reblogged this · 1 year ago
verathin reblogged this · 1 year ago -
 kiseki-no-robotto-translations liked this · 1 year ago
kiseki-no-robotto-translations liked this · 1 year ago -
 pandamonyum reblogged this · 1 year ago
pandamonyum reblogged this · 1 year ago -
 patronsaintofdemons liked this · 1 year ago
patronsaintofdemons liked this · 1 year ago -
 bandomfandombeyond reblogged this · 1 year ago
bandomfandombeyond reblogged this · 1 year ago -
bandomfandombeyond liked this · 1 year ago
-
 timininimi reblogged this · 1 year ago
timininimi reblogged this · 1 year ago -
 burning-mind reblogged this · 1 year ago
burning-mind reblogged this · 1 year ago -
 1mnobodywhoareyou reblogged this · 1 year ago
1mnobodywhoareyou reblogged this · 1 year ago -
 invisibleraven reblogged this · 1 year ago
invisibleraven reblogged this · 1 year ago
More Posts from Moose-mousse
Sometimes you just accept a flaw and move along
So I am building a robot from scratch. It just needs to be a platform for my other projects. It takes Twist commands (Basically, orders how fast to move in what directions) and return odometry (Basically, where the robot thinks it is), both over wifi via the HTTP protocol. Because the odometry math is a lot easier with stepper motors(motors that moves in tiny discreet steps. Usually several hundreds for a single rotation), these are what I am using: I am using 2 TMC2100 boards to drive them. These have 2 pins that you can set to Ground, supply or let them float, and they are used to configure what amount of micro-stepping you want to do (If a stepper motor have 200 steps for a rotation, micro stepping 4 means it takes 4 smaller steps to do one of those 200 "real" steps, and so takes 800 steps for a full rotation) All great... eeeeexept... for some reason the configuration pins just does... nothing, no matter what I set them to. The boards are just stuck at 16 micro-steps, as if both pins where set to supply. This limits the robots speed to 0.3 meters per second... which is... fine. The amount of work and money it would take to fix this(Likely I would have to buy new boards) is not worth a speed boost that is not needed for the first 2-3 projects I want to test on top of it... so I am just leaving it. "Perfect is the enemy of good" and all that... but it still feels unsatisfying... blaaa
Immediate shutdown
So I had my first post become a bit popular... and so my brain decided to do the dumb thing it does, and stop me from even opening Tumblr for a week. yay!
Have you seen a girl boy
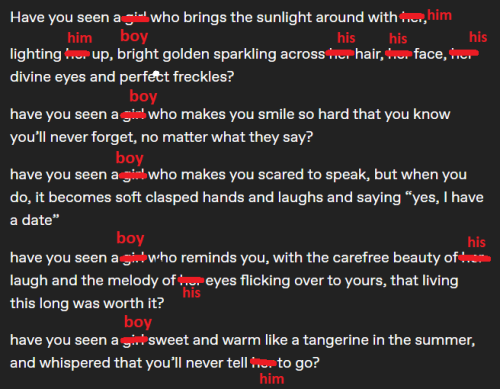
I saw a... WONDERFULL poem that really hit me, but I needed to fix it a bit first, before I send it to my boys .Original from here:
My place is never cleaner than when I have coding to do that I really do not want to do
